Stuff I Build
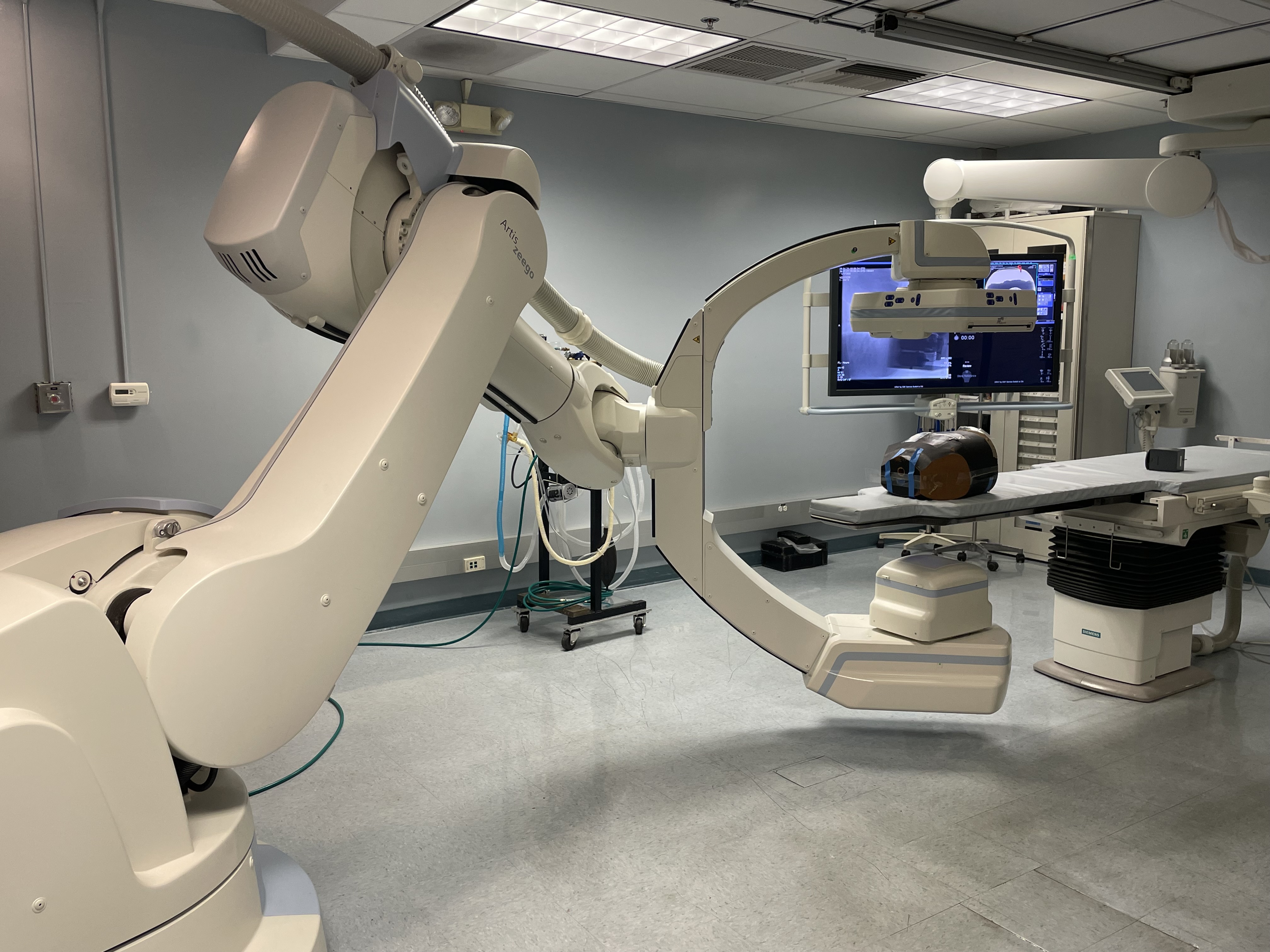
Model predicts optimal trajectory of robotic C-arm X-ray system to get best images during spine surgery. @Stanford University RSL
Minimalist gym tracker. Plan a workout once, then on the gym floor just swipe through exercises and tap the actual weight you hit. Each session auto-updates the next session's targets so you progressively overload without having to think about it.
Built as a PWA with email/password auth and per-user cloud storage. Live at risstobias.github.io/Kryll.
Developed a software to predict when patients feel the urge to smoke during withdrawal and trigger a timely behavioral intervention before the craving peaks.
Built a first proof of concept and won the Healthcare Hackathon Bayern 2024.
Developed an algorithm to diagnose hemochromatosis from routine dual-energy PCCT liver scans.
Detecting iron concentrations down to 2 mg/ml in phantom studies. Enabling disease detection from any standard dual-energy CT liver scan, with no need of current invasive procedures
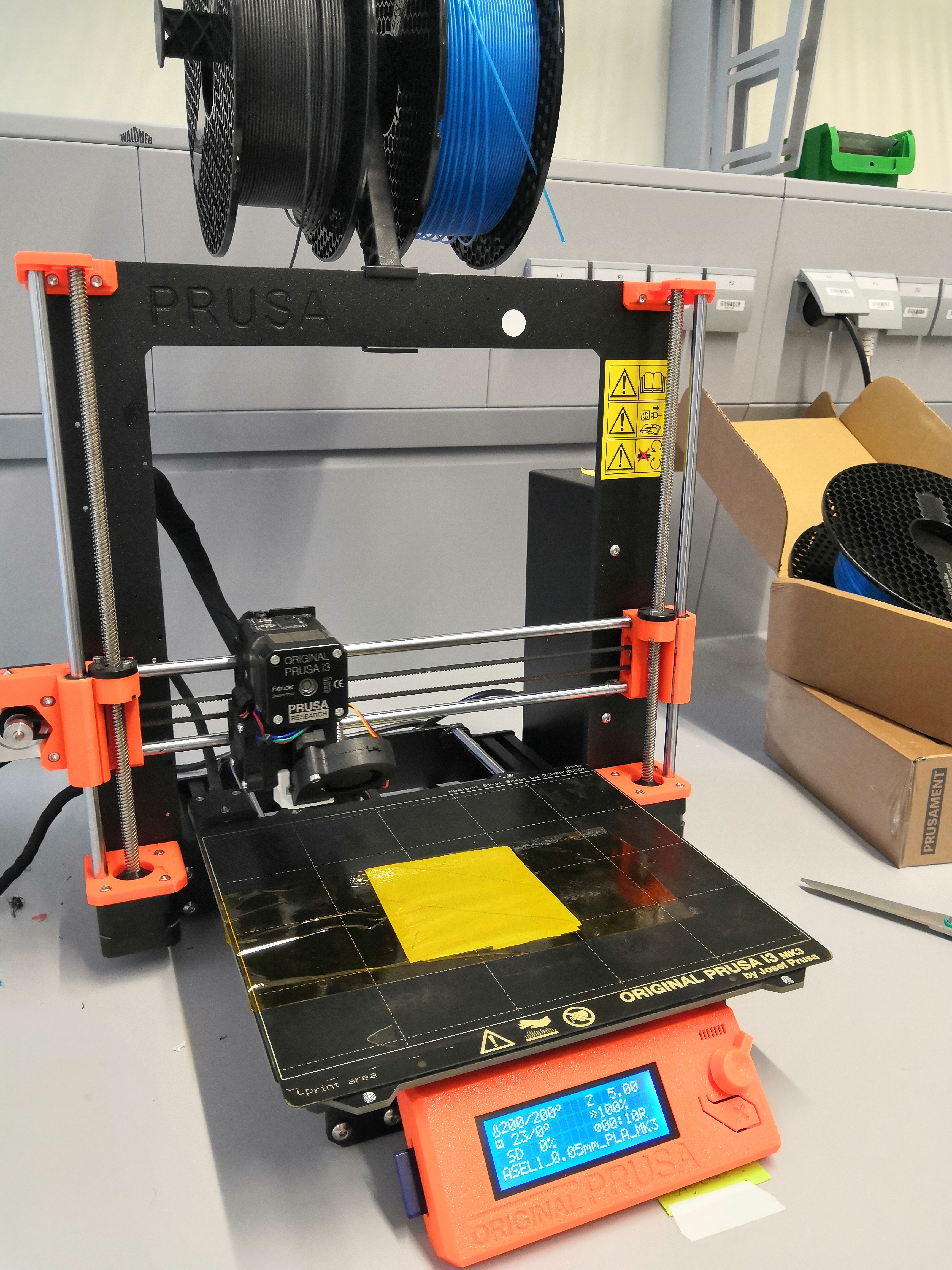
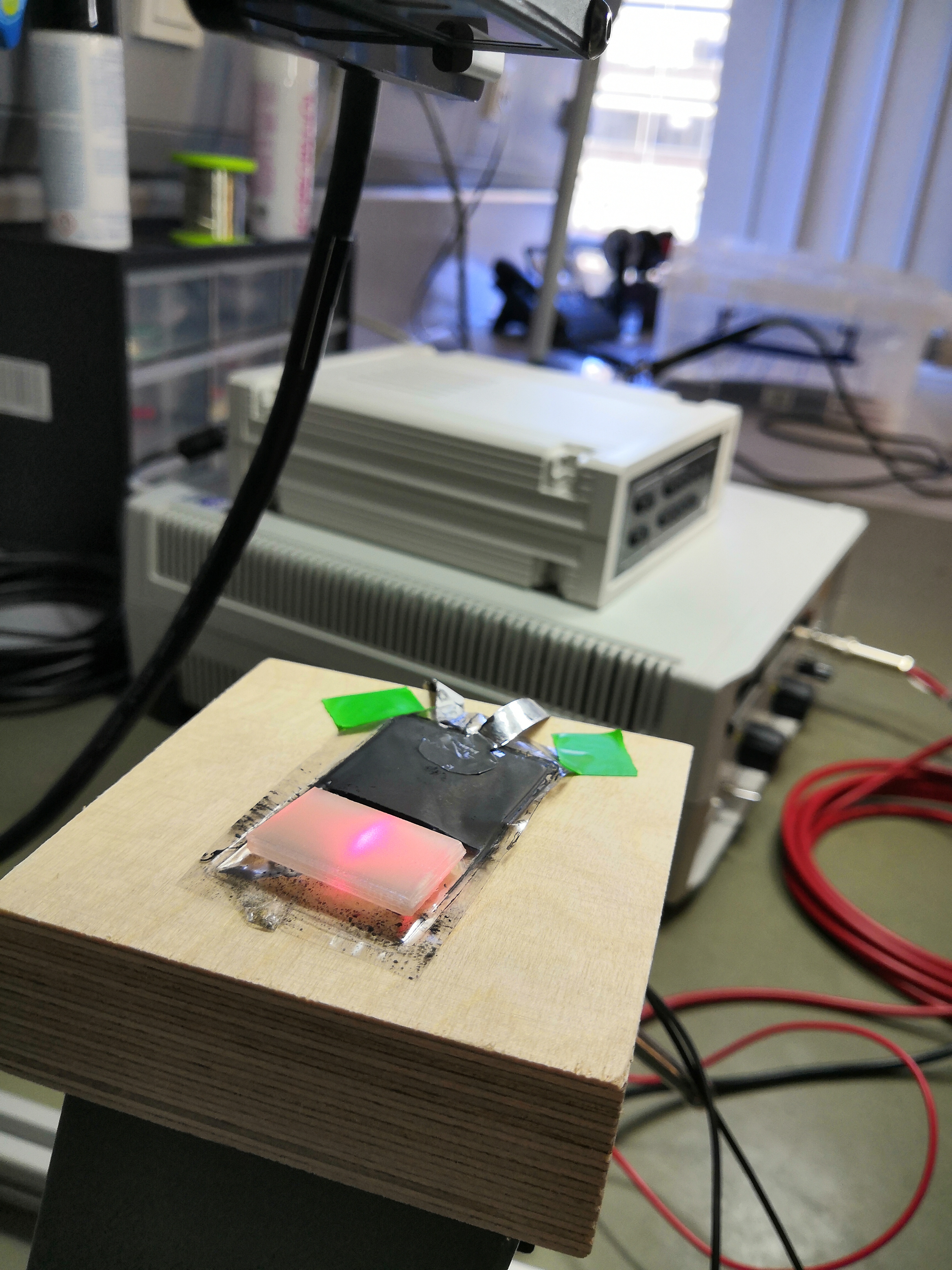
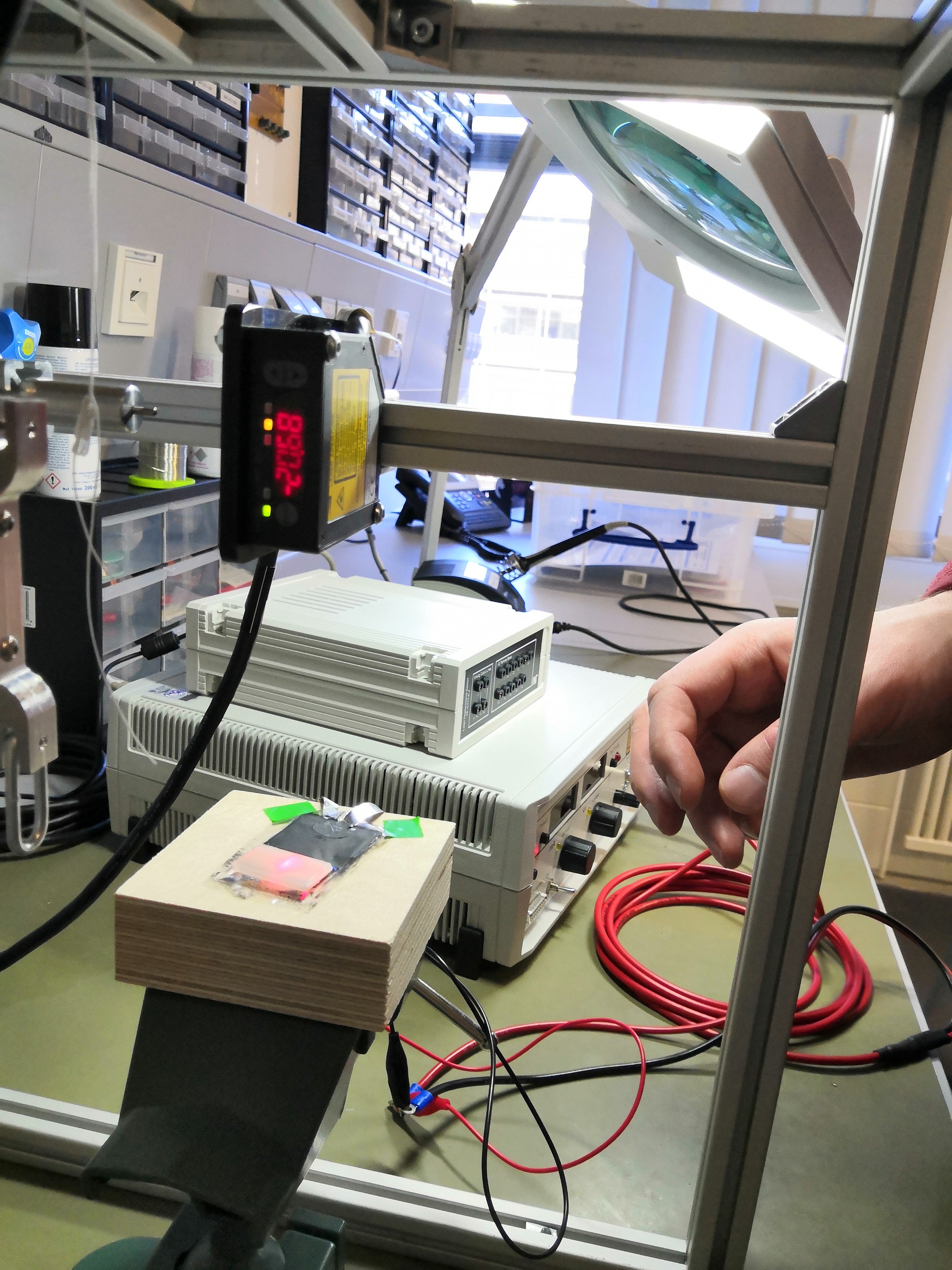
Developed a method to explore simple manufacturing of HAZEL actuators using 3D printer.
Successfully built and tested functional HAZEL actuators within the $30 budget constraint.
Developed a full system using a glove with electrodes to control a robot through muscle tension and hand movement alone.
Awarded the Paul Hartmann AG high school CS award.